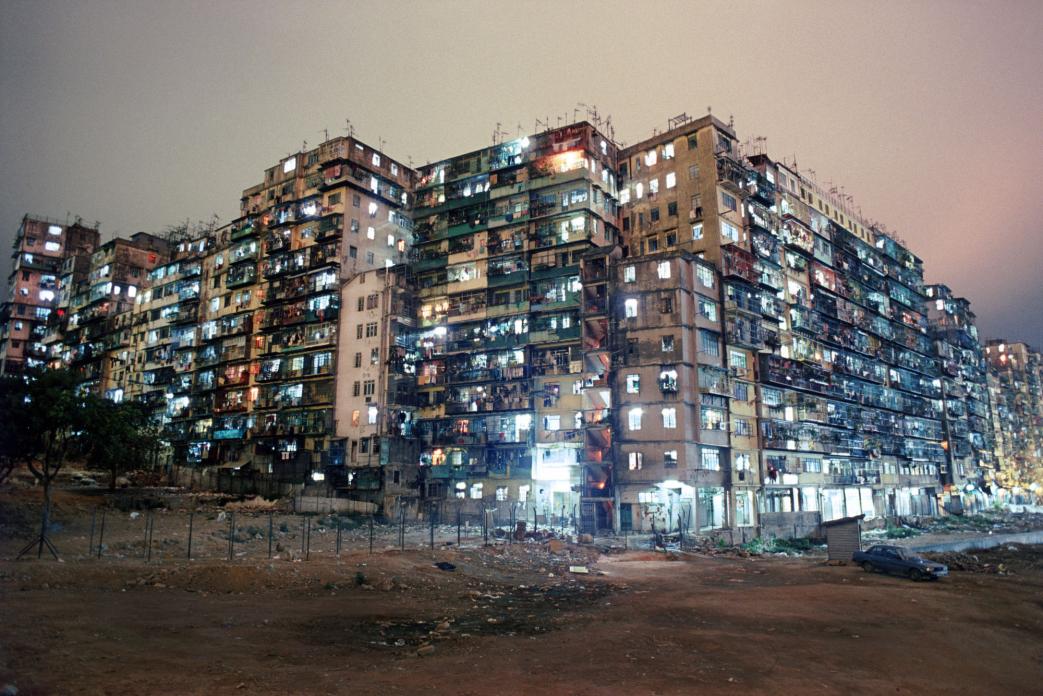
What sounds like an introduction to a Science Fiction story has actually happened in New Kowloon, Hong Kong. After World War II, the Walled City, originally a Chinese military fort became a Chinese enclave within British Hongkong with practically no government enforcement from the Chinese or the British. The Kowloon Walled City became a hotspot of human interaction with about 33000 residents (some estimations even going up to 50000) living at an area of only 2.6 hectars (approximately the size of a football stadium).

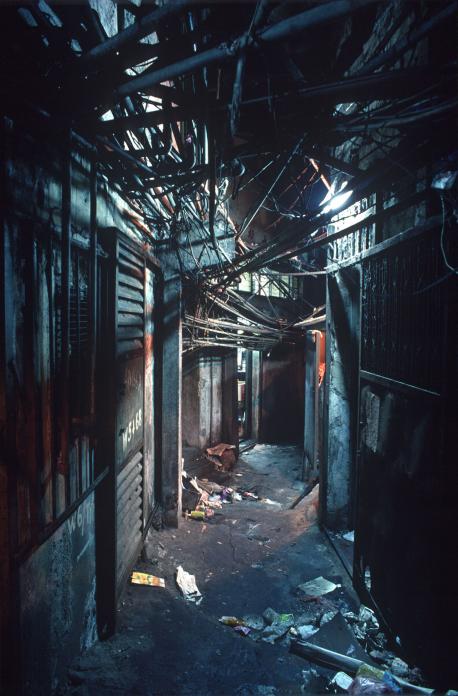
 The city was anarchic in its architecture and citizens. Without govermental health and sanitation inspectors, the city attracted sloppy food processors, unlicensed doctors and dentists as well as criminals.
The city was anarchic in its architecture and citizens. Without govermental health and sanitation inspectors, the city attracted sloppy food processors, unlicensed doctors and dentists as well as criminals.Walled City became a haven for crime and drugs, despite its small area hosting countless brothels, gambling parlors, and opium dens.
Until 1974 the city was run by the Chinese Triads until 1974 with police only venturing in large groups into the city. From 1973-74 on, subsequent police raids helped in cutting back the Triads' power and reducing the crime rate. In 1983, crime was declared to be under control.

Despite a reduction in the reported crime rate, both the British and the Chinese governments found the City to be increasingly intolerable. The Hong Kong government announced plans to demolish the Walled City in 1987. Despite the possibility of a financial compensation to citizens and businesses, this was not to the delight of some of the citizens. After a long protracted eviction process, demolition began in March 1993 and was completed in April 1994. Today, the area is occupied by the Kowloon Walled City Park.
Thumbnails are based on photos from the Canadian photographer Greg Girard who, in collaboration with book author Ian Lambot, spent five years in Kowloon Walled City to get to know the residents and to learn how it was (self-)organized. Arial view of Kowloon City by Stevage under GFDL 1.2.
- Greg Girard. Kowloon Walled City photo series.
- Pamela Owen. Inside the Kowloon Walled City. DailyMail online,
